SkyDome sensor
SkyDome sensor is EOL, replaced by Inclin'O (50-70-201-xxx)
Declaration of conformity
Download the declaration of conformity
Presentation
The SkyDome sensor is a LoRaWAN class A sensor that uses a disposable 3.6V A-type battery as power supply, and includes an internal antenna.
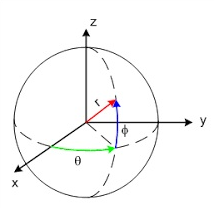
Initially used to check the closing state of the roof windows, It constantly measures the displacement of the vertical angle of the sensor (Φ). The current angle displacement is measured relative to the position when the sensor is started, awaken from storage mode, or reset to factory state. The initial reference 0° can therefore be a none-horizontal position.
|
|
 |

With its default configuration SkyDome is configured to report a secured alarm each time the threshold of 27.5 degrees is crossed when falling or exceeding.
However, angle shift reports or alarms can be reconfigured for any specific use.
Family code
The family code of SkyDome devices is: 50-70-143-xxx
Casing
Flammability rating: UL94V0
Ingress protection: IP55
Installation and operation
Installation
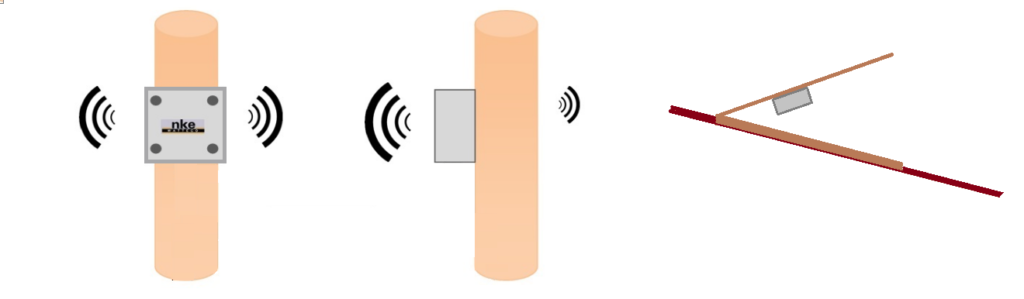
| The housing is intended to be installed inside or outside a building but it must be protected from vertical water spray and direct sunlight.
The housing can be screwed, or binded with double sided tape, but notice that it also can be used with various DIN rail adapter. |
 |
Radio propagation
In order for the sensor to operate correctly, the number of obstacles should be limited in order to avoid excessive radio wave attenuation. It is also important to place the sensor as high as possible. Notice that in the case of usage on roof windows the sensor may not be binded vertically, but even if the sensor is not in the best position, the upper situation (on the roof) of the sensor should ensure good results.
Autonomy
The information in the table below represents how long the battery can last. It is based on the default configuration at ambient temperature (+25°C) within the optimal operating range of the sensor via a LoRaWAN network (one uplink frame), when the spreading factor used is SF12.
The disposable battery has a 3.6Ah capacity, of which 85% is used.
| Transmission periodicity | Battery life |
|---|---|
| 3 frames / 24 hours | +10 years |
Human Machine Interface
The SkyDome sensor has a buzzer that allows it to “communicate” with the user.
A reed switch is available under the sticker "ILS". It is possible to use a magnet to activate it and makes specific actions on the sensor (Switch off, switch on, Re-associtation…). When the reed switch is activated, the buzzer rings quickly.

To Start-up the device, it is necessary to put a magnet on the side of the sensor during one second (at the left side). The buzzer rings quickly during this step. After this second, the buzzer stops and rings slowly until the association is done.
To switch off the device, use the same way by putting the magnet during 5 seconds. After this amount of time, the device rings 5 times slowly.
The table below describes the actions to be performed on the reed switch to disable or enable the storage mode.
| Switch ON (disable storage mode) | 1 second | |
| Switch OFF (enable storage mode) | 5 seconds |
When the sensor is trying to associate with a network, it emits the following sound:
Once the association is completed, the buzzer makes the following sound:
A reed switch (or magnetic switch) is available. A magnet can be used to activate it and perform specific actions on the sensor (switch off, switch on, reassociation…).
- Configuration: "void" frames are sent every minute for 10 minutes.
Standard reports are disabled in this mode.
| Way to trigger it | One passage of the magnet near the reed switch or specific ZCL command |
| Way to stop it | Another passage of the magnet or specific ZCL command |
| Effects on the sensor | |
| Duration | The configuration mode lasts 10 minutes |
- A reassociation procedure can be requested if no downlink frame is received by the sensor during a given periodicity (4 days by default) or if a given number (100 by default) is reached or in case of failure (no acknowledgement received) by sending an applicative frame to the sensor or via the sensor’s IHM.
The sensor keeps the AppEUi and DevAddr configured, Confirmed/Unconfirmed configuration and all applicative configurations. However, LoRaWAN configurations (channel, data rate…) are lost
| Way to trigger it | Three passages of the magnet near the reed switch or ZCL command from LoRaWAN cluster. |
| Effects on the sensor | |
- A factory reset is available on Watteco’s sensors. It deletes all the applicative settings saved in the flash memory (i.e. configured batches and reports will be deleted).
The sensor keeps the AppEUi and DevAddr configured. However, LoRaWAN configurations (channel, data rate…) and applicative configurations are lost.
| Way to trigger it | Two quick passages and a very long passage (until the sensor rings for the reset) of the magnet near the reed switch |
| Effects on the sensor | |
Applicative layer
Codecs are available to decode frames: Downloads
The SkyDome device implements “Analog Input” cluster associated to angle displacement measurement on EndPoint 0.
Skydome integrates the following clusters:
| Cluster | Cluster name | Managed attributes |
|---|---|---|
| 0x0000 | Basic | All |
| 0x0050 | Configuration | All |
| 0x8004 | LoRaWAN | All |
| 0x000C | AnalogInput (Vertical angle displacement) | All |
Default configuration
A default configuration is set:
- The device reports each crossing of 27,5° angle displacement measured from position at sensor startup.
Every change made to the default configuration must comply with the legal duty cycle (for example, the most restrictive in the EU is 0.1%, which corresponds to approximately 1 frame per hour with SF12)
Frame examples
All frames have to be sent on port 125
(Please, Try and see also Watteco Online codecs)
Standard report
Report
Report on angle displacement crossing programmed threshold Received payload is: 11 8a 000c 0055 39 42fe23d7 98 d0 . 0x11 = FCtrl (EndPoint 0)
. 0x8a = Report is an alarm (Most significant bit is set)
. 0x42fe23d7 = Current vertical angle displacement (127°) (IEE754 float)
. 0x98 = NewCfg/Reserved/ShortCause/SecuredIfAlarm/AllNotSecured/HeaderKept/NotBatch: b 1 0 01 1 0 0 0
. 0xD0 = IsAlarm/OnExceed/NotOnFall/Threshold/slot0: b 1 1 0 10 000
Configuration
Configure 27,5° Threshold crossing (default configuration) Report angle displacement(analoginput) alarm, when angle crosses threshold or once each 24h (1440 min ==>0x85A0): The angle displacement is given by EndPoint 0 (0x11) on Cluster “Analog Input” 0x000C, and Attribute “present value” is 0x0055. Applicative payload to send is: 11 06 000c 98 0055 39 0002 85A0 F0 41dc0000 40200000 03 . 0x98 = NewCfg/Reserved/ShortCause/SecuredIfAlarm/AllNotSecured/HeaderKept/NotBatch: b 1 0 01 1 0 0 0 Expected response: 11 07 000c 00 00 0055 To disable configuration on slot 0 : 11 06 000c 80 0055 39 0000 0000 00
. 0xF0 = IsAlarm/OnExceed/OnFall/Threshold/Slot0 : b 1 1 1 10 000 ==> xF0
. 0x41dc0000 = 27,50° Threshold
. 0x40200000 = 2,50° Hysteresis around threshold
. 0x03 = Number of succesive measured occurences crossing to set an alarm
Configure a simple periodic report on angle displacement change Report the angle displacement value when angle changes more than 10°, and report it at least least every 2 hours (120 min ==> 0x8078), but no more than one report each 30seconds (0x001E) The angle displacement is given by EndPoint 0 (0x11) on Cluster “Analog Input” 0x000C, and Attribute “present value” is 0x0055. Applicative payload to send is: 11 06 000c 00 0055 39 001E 8078 41200000 . 0x00 = NotNewCfg/NotBatch : b 0 0 0 0 0 0 0 0 Expected response: 11 07 000c 00 00 0055 To disable configuration : 11 06 000c 00 0055 39 0000 0000 00000000
. 0x41200000 = 10° Variation
